







浙江舟山市普陀区
∨





CMZ900B电罗经 日本横河CMZ900船用电罗经 CCS/EC船检
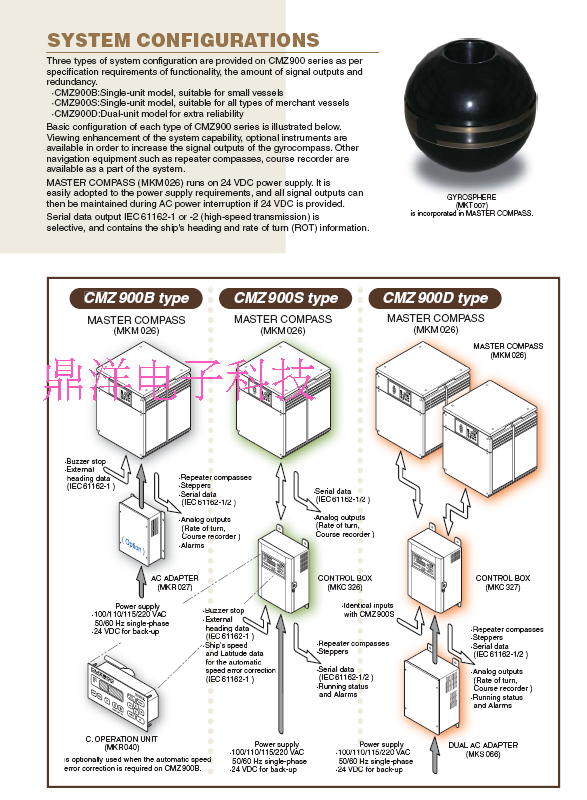
CMZ900系列有三种型号:
CMZ900B:单罗经,适用于小船
CMZ900S:单罗经,适用于各类商船
CMZ900D:双罗经,安全性能更加可靠
电罗经由一个快速旋转的转子装置检测正北方向,悬浮无摩擦,由地球引力和旋转的影响。船的航向被转换成串行数据后传输到分罗经和其他船舶设备,也可根据不同的设备需要的其他格式,比如步进或模拟信号。
Gyrocompass System Description :

Gyrocompass System
A gyrocompass detects the direction of true north by means of a fast-spinning rotor, which is suspended with no friction and is influenced by gravity and rotation of the Earth. A gyrocompass consequently indicates a ship's heading. The ship's heading is transmitted to repeater compasses and other ship's equipment after the signal format is converted to serial data or to stepper or analog signals depending on what type of format the equipment requires.
There are three models in the CMZ900 series:
CMZ900B: Single-unit model, suitable for small vessels
CMZ900S: Single-unit model, suitable for all types of merchant vessels
CMZ900D: Dual-unit model for extra reliability

GYROCOMPASS CMZ-900B series
Features
- The system configuration can easily be adapted to each vessel's specifications.
- IEC 61162-2 high-speed code is available for the heading and rate of turn (ROT) outputs.
- A unique anti-vibration system enhanced by the velocity damping effect of high viscous oil, provides superior damping of vibration and decoupling of shock at sea.
- A small and lightweight container enhances the follow up speed. The gyrocompass changes smoothly and does not lag when a small vessel rapidly changes course.
- A space-saving design: the master compass can be installed on the autopilot stand.
-
The restart time can be preset from 1 to 99 hours.
-
System Configuration of CMZ900B
Explanation of Units (Basic configuration): CMZ900B type
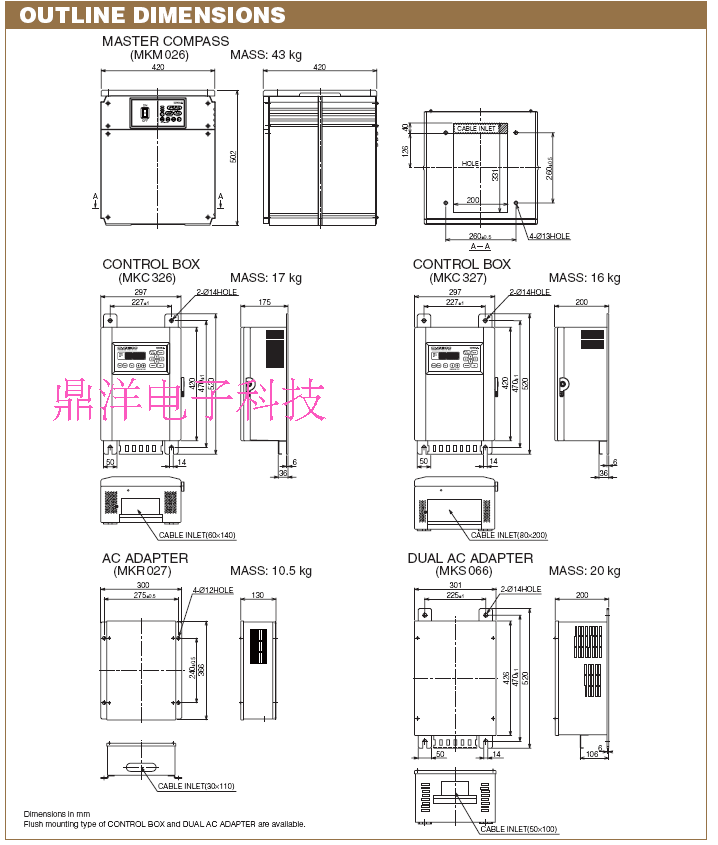
1) Master Compass MKM026
The master compass consists of a control unit, container unit, and anti-vibration mechanism.
A gyrosphere, the key component of north seeking, is suspended in the container unit.
2) C.Operation Unit MKR040 (Optional)
The C.Operation unit receives the ship's speed and position data, and then corrects the speed error of the ship's heading signal.
3) AC Adapter MKR027 (Optional)
Since the master compass works on DC power, an AC adapter is used when AC power is supplied.
Thus, a two-way power supply can be easily achieved if needed.
Specifications
|
Settling Time and Accuracy |
Settling time |
Within 5 hours (Operational state is reached in about 2 hours) |
|
| Accuracy |
Static: ±0.25 deg.x sec (Latitude) Dynamic: ±0.75 deg.x sec (Latitude) |
||
| Follow up accuracy | 0.1 deg. or less | ||
| Max. follow up speed | 30 deg./s | ||
|
Environmental (Normal use) |
Permissible angle | ±40 deg.(Roll), ±40 deg. (Pitch) | |
| Ambient temperature | -10 deg.C to +55 deg.C | ||
| Power Supply | Main |
24V DC AC adapter (Option), type MKR027 is available on 100V/110V/115V/220V AC 50/60Hz single-phase |
|
| Alarm | 24 V DC | ||
| Signal Inputs | External heading | IEC61162-1 (NMEA0183) | 1 circuit |
| Options (Available on adding C.Operation unit, type MKR024) | |||
|
Automatic speed error correction |
Optional | ||
| Latitude | IEC61162-1 (NMEA0183) | 1 circuit | |
| Ship's speed | 200 P/nm or IEC61162-1 (NMEA0183) | 1 circuit | |
|
External heading (For deviation alarm) |
IEC61162-1 (NMEA0183) (Supplied to C.Operation unit, MKR024) |
1 circuit | |
| Signal Outputs | Heading data for repeater compasses | 3 circuits | |
| Heading data for steppers | 1 circuit | ||
| Serial data | IEC61162-1 | 1 circuit | |
| IEC61162-1/-2 selective | 2 circuits | ||
| Gyro. running (Close contact when running) | 1 circuit | ||
|
Alarms (Open contact when abnormal) |
System failure | 1 circuit | |
| No voltage | 1 circuit | ||
GYROCOMPASS CMZ-900S series
Features
-
The system configuration can easily be adapted to each vessel's specifications.
-
IEC 61162-2 high-speed code is available for the heading and rate of turn (ROT) outputs.
-
A unique anti-vibration system enhanced by the velocity damping effect of high viscous oil, provides superior damping of vibration and decoupling of shock at sea.
-
A small and lightweight container enhances the follow up speed. The gyrocompass changes smoothly and does not lag when a small vessel rapidly changes course.
-
A space-saving design: the master compass and the control box can be installed on the autopilot stand.
-
Automatic speed error correction is possible if both the ship's speed signal from the speed log and the latitude signal from a GPS or some other positioning device is available. Further, the latitude can be estimated from the ship's speed and the gyrocompass reading if the positioning device signal is absent.
-
An external heading signal from an instrument such as a magnetic compass or a GPS compass can be passed to repeater compasses and other ship equipment for back-up purposes.
-
As a standard function, a built-in monitor detects deviations between the master compass and external sensor heading readings.
-
The restart time can be preset from 1 to 99 hours.
-
System Configuration of CMZ900S
Explanation of Units (Basic configuration): CMZ900S type
1) Master Compass MKM026
The master compass consists of a control unit, container unit, and anti-vibration mechanism.
A gyrosphere, the key component of north seeking, is suspended in the container unit.
2) Control Box MKC326
The control box consists of a power supply unit, control unit, and computing unit engaged in speed error correction of the ship's heading signal.
The control box amplifies heading signals coming from the master compass.
The amplified heading signals are distributed to repeater compasses and other ship's equipment depending on what type of format the equipment requires.
Specifications
|
Settling Time and Accuracy |
Settling time |
Within 5 hours (Operational state is reached in about 2 hours) |
|
| Accuracy |
Static: ±0.25 deg.x sec (Latitude) Dynamic: ±0.75 deg.x sec (Latitude) |
||
| Follow up accuracy | 0.1 deg. or less | ||
| Max. follow up speed | 30 deg./s | ||
|
Environmental (Normal use) |
Permissible angle | ±40 deg.(Roll), ±40 deg. (Pitch) | |
| Ambient temperature | -10 deg.C to +55 deg.C | ||
| Power Supply | Main |
100V/110V/115V/220V AC 50/60Hz single-phase 24V DC (For back up power) |
|
| Alarm | 24 V DC | ||
| Signal Inputs |
Automatic speed error correction |
Latitude: IEC61162-1 (NMEA0183) | 1 circuit |
|
Ship's speed: 200 P/nm or IEC61162-1 (NMEA0183) |
1 circuit | ||
| External heading | IEC61162-1 (NMEA0183) | 1 circuit | |
| Signal Outputs | Heading data for repeater compasses | 8 circuits | |
| Heading data for steppers | 4 circuits | ||
| Serial data | IEC61162-1 | 1 circuit | |
| IEC61162-1/-2 selective | 2 circuits | ||
| Analog heading data | Heading signal | 1 circuit | |
| Quadrant signal | 1 circuit | ||
| Turn rate signal | 3 circuits | ||
| Gyro. running (Close contact when running) | 1 circuit | ||
|
Alarms (Open contact when abnormal) |
System failure | 1 circuit | |
| Master compass failure | 1 circuit | ||
| No voltage | 1 circuit | ||
| Heading deviation signal (Close contact when excessive) | 1 circuit | ||
CMZ-900D Gyrocompass
Specifications
- The system configuration can easily be adapted to each vessel's specifications.
- IEC 61162-2 high-speed code is available for the heading and rate of turn (ROT) outputs.
- A unique anti-vibration system enhanced by the velocity damping effect of high viscous oil, provides superior damping of vibration and decoupling of shock at sea.
- A small and lightweight container enhances the follow up speed. The gyrocompass changes smoothly and does not lag when a small vessel rapidly changes course.
- A space-saving design: the master compass and the control box can be installed on the autopilot stand.
- Automatic speed error correction is possible if both the ship's speed signal from the speed log and the latitude signal from a GPS or some other positioning device is available. Further, the latitude can be estimated from the ship's speed and the gyrocompass reading if the positioning device signal is absent.
- An external heading signal from an instrument such as a magnetic compass or a GPS compass can be passed to repeater compasses and other ship equipment for back-up purposes.
- Mechanical switchover as well as switchover by software control, is available to select which master compass can be used for the purpose of reliability on the switch action.
- As a standard function, a built-in monitor detects deviations between the master compass and external sensor heading readings.
-
The restart time can be preset from 1 to 99 hours.System Configuration of CMZ900DExplanation of units (Basic configuration): CMZ900D type
1) Master Compass MKM026
The master compass consists of a control unit, container unit and anti vibration mechanism.
A gyrosphere, key component of north seeking, is suspended in the container unit.
2) Control Box MKC327
The control box receives heading signals from the two master compasses.
By means of a switch function, the selected master compass transmits the heading signals to repeater compasses and other types of ship equipment, and the heading of all repeater compasses will align with the selected master compass heading with just the push of a button.
3) Dual AC Adapter MKS066
The dual AC adapter is capable of simultaneous AC supply to two master compasses. Two way, AC and DC power supply for each master compass can be easily achieved if needed.
Specifications
|
Settling Time and Accuracy |
Settling time |
Within 5 hours (Operational state is reached in about 2 hours) |
|
| Accuracy |
Static: ±0.25 deg.x sec (Latitude) Dynamic: ±0.75 deg.x sec (Latitude) |
||
| Follow up accuracy | 0.1 deg. or less | ||
| Max. follow up speed | 30 deg./s | ||
|
Environmental (Normal use) |
Permissible angle | ±40 deg.(Roll), ±40 deg. (Pitch) | |
| Ambient temperature | -10 deg.C to +55 deg.C | ||
| Power Supply | Main |
100V/110V/115V/220V AC 50/60Hz single-phase 24V DC (For back up power) |
|
| Alarm | 24 V DC | ||
| Signal Inputs |
Automatic speed error correction |
Latitude: IEC61162-1 (NMEA0183) | 1 circuit |
|
Ship's speed: 200 P/nm or IEC61162-1 (NMEA0183) |
1 circuit | ||
| Alarm | IEC61162-1 (NMEA0183) | 1 circuit | |
| Signal Outputs | Heading data for repeater compasses | 8 circuits | |
| Heading data for steppers | 4 circuits | ||
| Serial data | IEC61162-1 | 1 circuit | |
| IEC61162-1/-2 selective | 2 circuits | ||
| Analog heading data | Heading signal | 1 circuit | |
| Quadrant signal | 1 circuit | ||
| Turn rate signal | 3 circuits | ||
| Gyro. running (Close contact when running) |
No.1/No.2 1 circuit ea. |
||
|
Alarms (Open contact when abnormal) |
System failure | 1 circuit | |
| Master compass failure |
No.1/No.2 1 circuit ea. |
||
| No voltage |
No.1/No.2 1 circuit ea. |
||
| Heading deviation signal (Close contact when excessive) | 1 circuit | ||

商品评价
0%好评
共有0人参与评分