





1.在一定航速下,控制外伸于两舷的鳍的攻角,以产生减摇力矩的装置。
2.利用外伸于船体两舷舭部的鳍在舰船航行时产生的升力,形成减摇力矩,以减缓舰船横摇的装置。
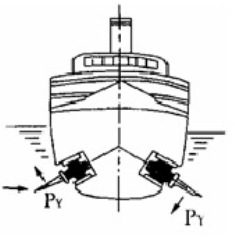
固定式减摇鳍安装示意图
减摇鳍装置是目前效果最好的主动式减摇装置。因结构复杂,成本较高,大多安装在舰艇、高速客船和旅游船上。按鳍放置的位置分有收放式和固定式。前者工作时鳍升出船外,不工作时收回船内,需占用一定的船内空间;后者固定升出船外,毋需占用舱位,但较易损坏,固定式减摇鳍的鳍从两弦伸出船体,安装于水线下的一定深度处,如图所示。。按液压控制系统可分为阀控式和泵控式。
相对所言,前者简单可靠,造价低,便于操作和维护,但功率消耗大,系统易发热;后者复杂,操作维护困难,造价高,但功率消耗小,经济性好,多用于大型舰船上。按控制方式分为模拟控制式和数字控制式。
前者采用内装式速度陀螺仪作为船舶运动的敏感元件,系统复杂,成本高,能耗大,易受环境影响,后者由微处理机控制,以加速度计为敏感元件,系统较简单又易调整,稳定性好,可靠性高,且不易受环境影响,是近年来广泛采用的控制方式。
减摇鳍工作原理是:当舰船在风浪中横摇时,减摇鳍在检测和控制系统作用下,改变鳍角大小,使左右两鳍上的升力形成反向力矩以抵消风浪的扰动力矩,从而减小横摇幅值。由于减摇鳍升力大小依赖于舰船航速,故航速降低时减摇效果差,停泊时不起减摇作用。
工作原理
.jpg)
减摇鳍装置工作原理框图
减摇鳍装置作为一个自动控制装置,它可以分成三部分:鳍机械组合体,驱动鳍的随动系统和控制系统部分。当舰船在风浪中航行产生横摇时,控制系统通过角速度陀螺仪采得舰船横摇的信息,通过一系列的运算处理后得到鳍角控制信号,经放大后送到电液随动系统,电液随动系统根据鳍角控制信号驱动鳍按指定动作运行。船体两边的鳍在液压驱动力和水动力的共同作用下,产生稳定力矩来平衡波浪对舰船产生的扰动力矩,以达到减摇的目的。该稳定力矩和波浪的扰动力矩大小尽量相同,方向却正好相反,称之为平衡力矩。减摇鳍装置工作原理框图如图所示。